Force feel'd
resistive-motion force feedback glove for virtual reality
Force Feel'd is a force-feedback glove designed and built during MakeMIT 2015, a hardware hackathon. This glove aims to bridge the disparity between senses when using virtual reality. With the Oculus Rift, you can visually immerse yourself in a multitude of virtual worlds and with Leap Motion, you can even interact with these environments through gestures. Unfortunately, inexpensive force feedback systems are still miles behind in comparison. Force Feel'd seeks to change that.
Force Feel'd interfaces with both the Oculus Rift and the Leap Motion to bring simple, unidirectional feedback to these VR interfaces, bridging mind and hand.
Phase I

CAD Mockup of the First Revision Glove
Our initial prototype was created during Phase I of the hackathon. We designed the glove to be first and foremost safe to use. We had originally considered direct manipulation of the hand to impart feel from the virtual environments, but decided to switch to resisting motion instead. Resistive motion enables the user to maintain control of their movements while still being subjected to the tactile experience from the glove.
We achieve resistive motion by using brakes to resist finger motion. These brakes are connected to a spool of string which then is attached to the finger with a ring. By applying circumferential pressure to the spool, we can resist the motion of the finger.
For this prototype, I helped design the braking mechanisms, modeled and processed the parts for 3D printing and laser cutting.
Our first prototype was presented at the end of Phase I and was awarded second place. We were invited back to participate in Phase II.

First Revision Glove
Our first glove taught us a lot. We learned that resistive motion was a viable alternative to tactile feedback and that we were able to create an integrated system that could detect and reflect the differences in hardness of blocks in a simulation. We used this knowledge to push our glove forward for Phase II of the hackathon.
Phase II
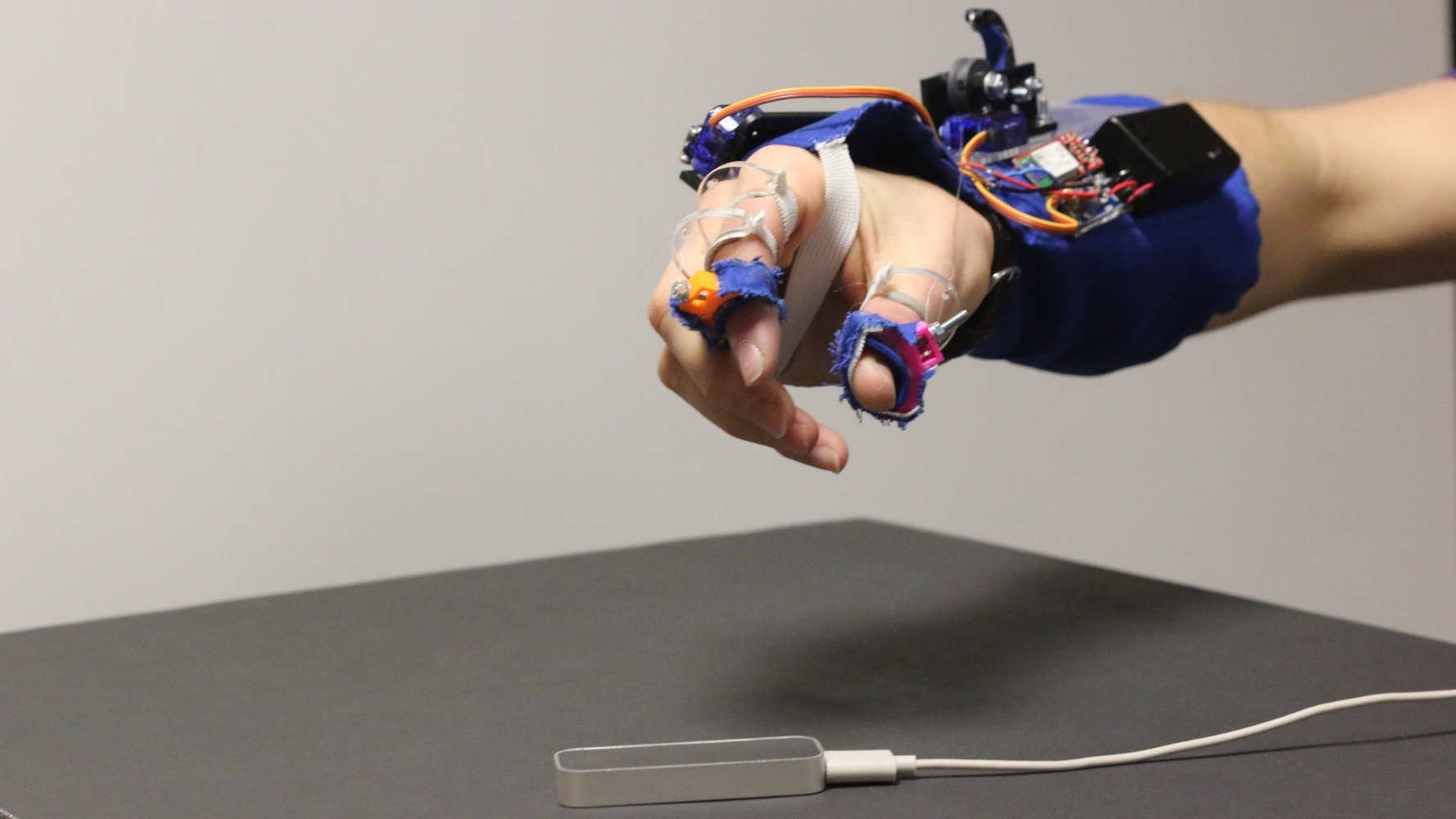
During Phase II, we redesigned all of the components while keeping our core technology - resistive motion. Our brakes were miniaturized to make it easier to expand motion resistance to other fingers. Our glove became adjustable so that more people could experience it. Finally, our glove was now wireless so that it could allow for a full range of arm movements.
I focused primarily on the ergonomics of the glove while still processing 3D printed and laser cut pieces. I wanted our new glove to be easy to wear and removable (unlike our first glove). It's main body is made of cotton and is easily adjustable to any sized arm or hand with most of it's closures made of velcro or elastic. The finger mounts are all lined with foam to increase wearing endurance.

New Vertical Brake Design
Our second prototype was presented at the end of Phase II and was awarded second place.

Second Revision Glove
In collaboration with Everardo Rosales, Joshua Sloane, Thomas Needham and Meghana Bhat for MakeMIT, a hardware hackathon, in Spring of 2015.
More information on the project can be found here.