BananaBot
Banana Carrying Robot
BananaBot is a robot designed to compete on a course for 2.007 Design and Manufacturing I. It would score points by carrying bananas up slopes of increasing steepness and placing them in a raised container.
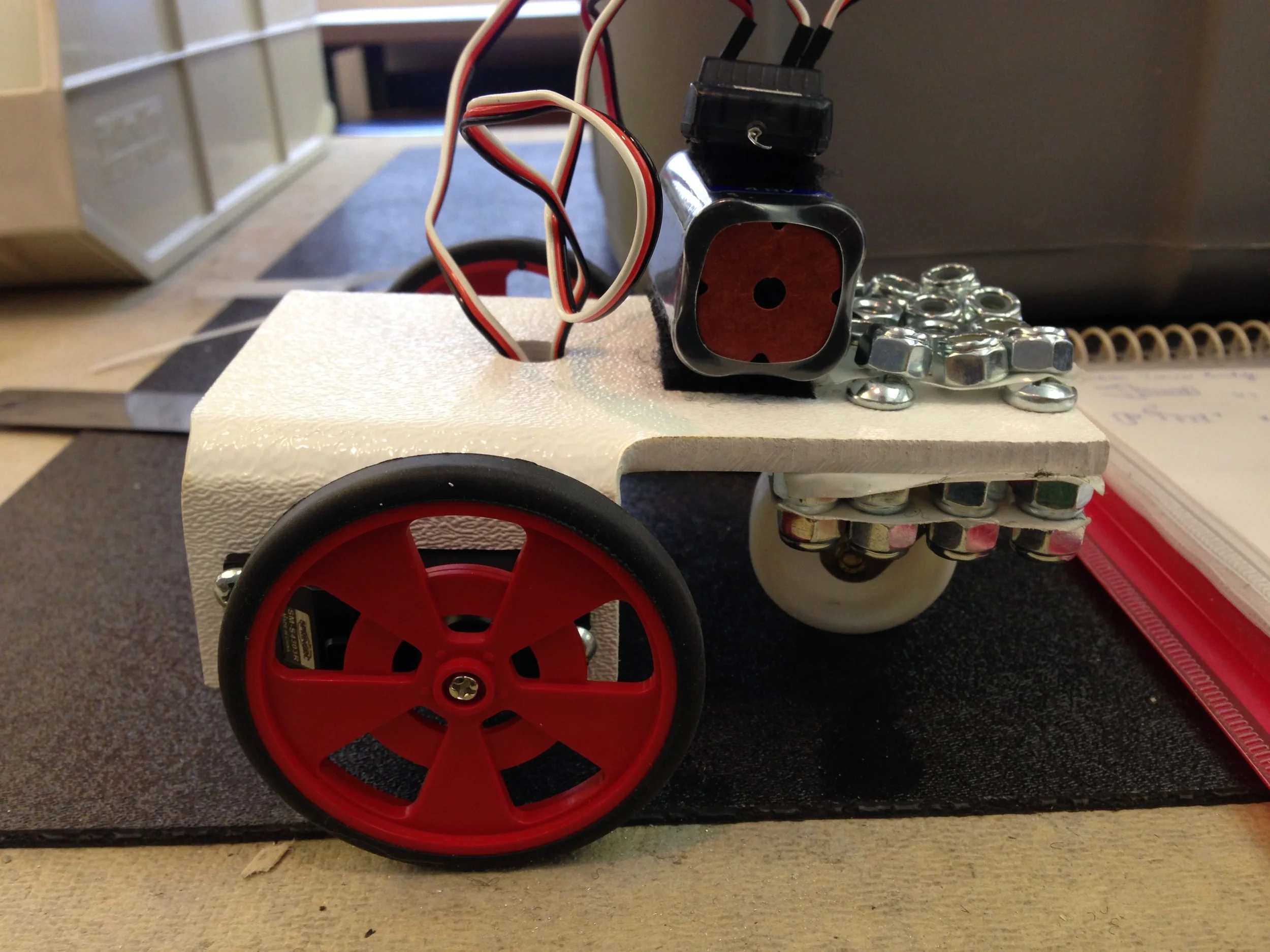
Simple Prototype Robot
The first of two robots built during this class is pictured above. The design for this robot was provided by the instructors, but the fabrication was completed alone. I used this robot as an opportunity to understand how to work with the 1/4" acrylic and how to bend it. The nuts attached to the front of the robot were to weigh it down to prevent tipping when it traveled up an incline. This robot was used as a testing base for additional features and attachments later on.
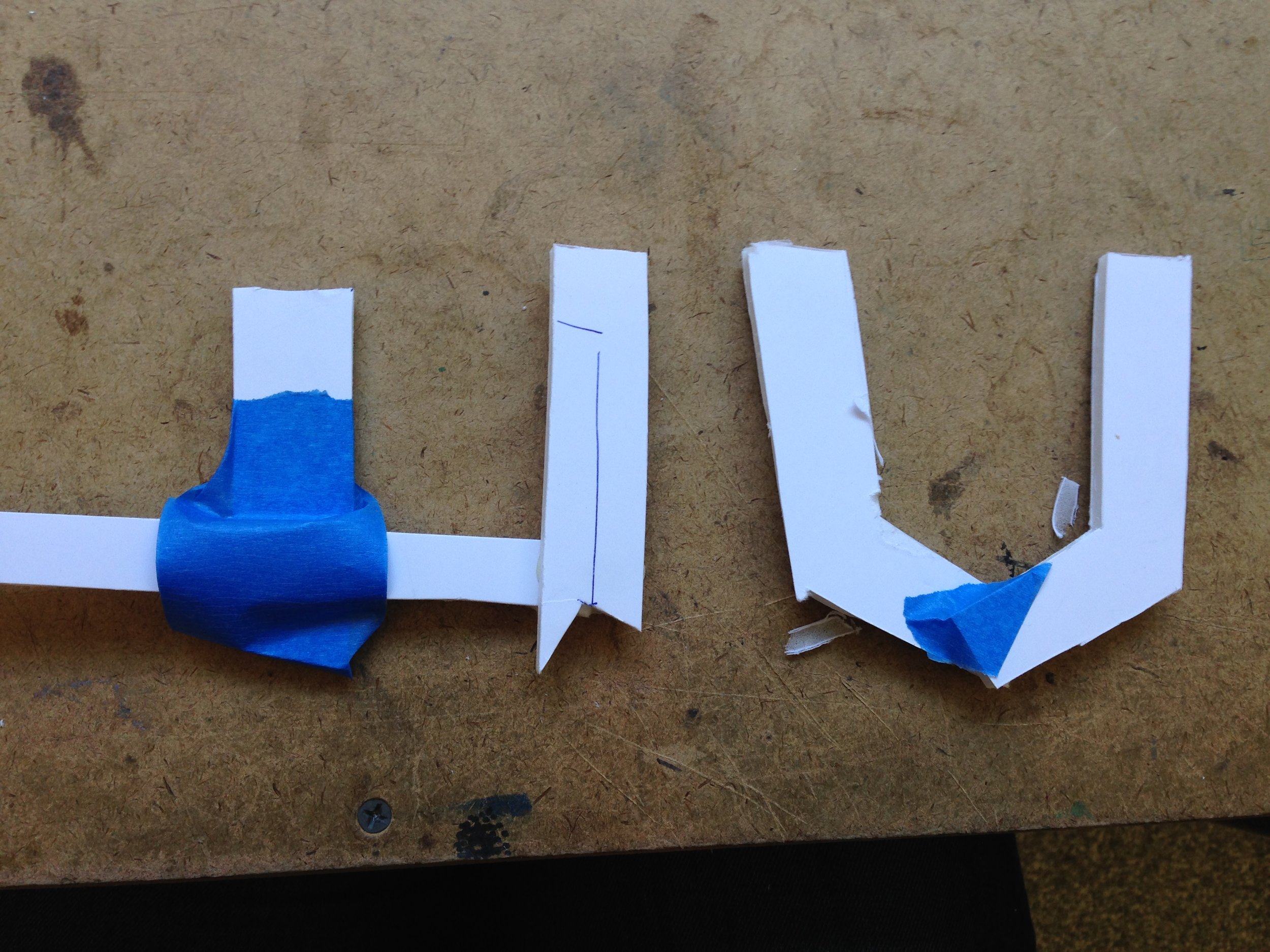
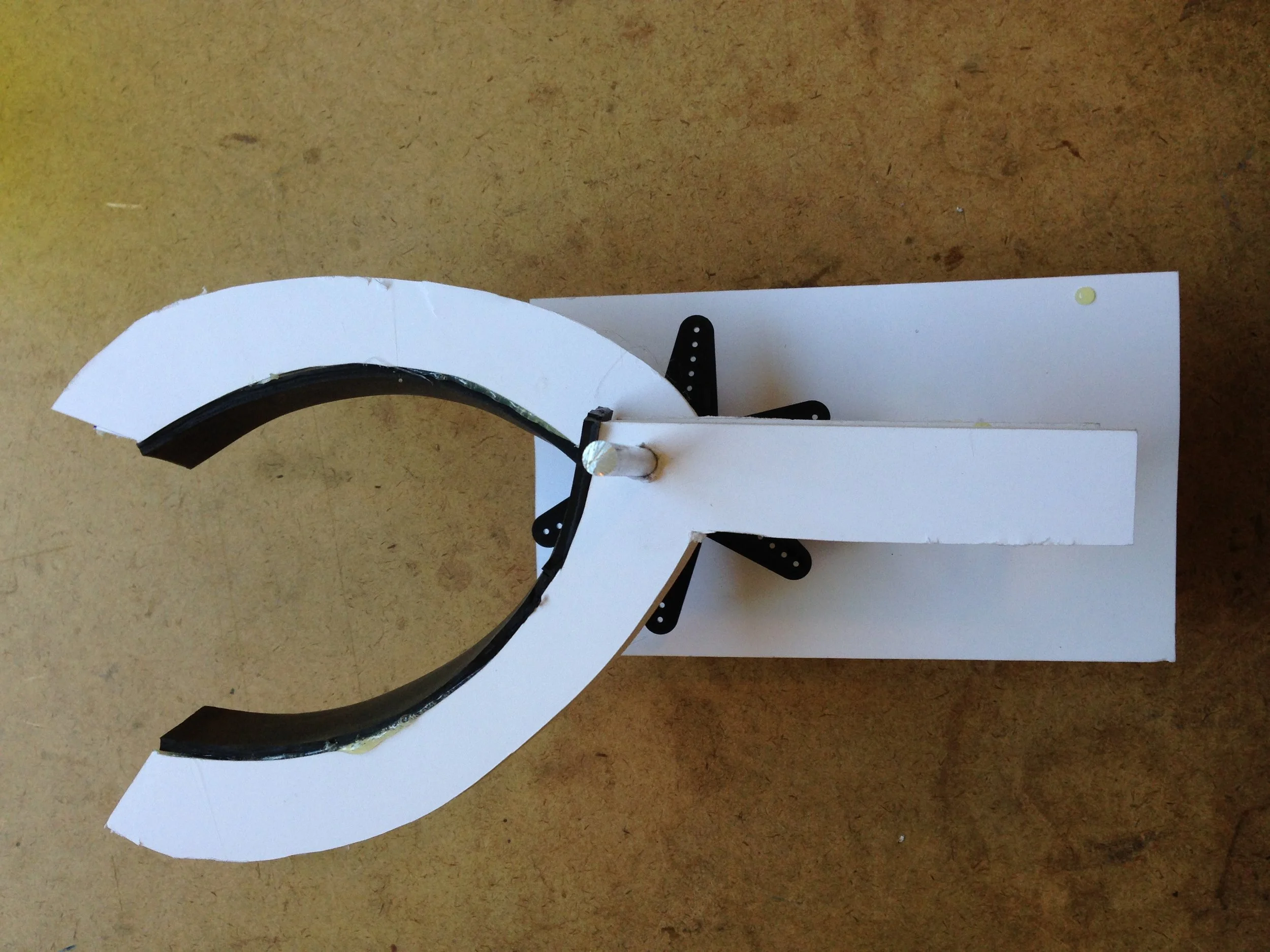
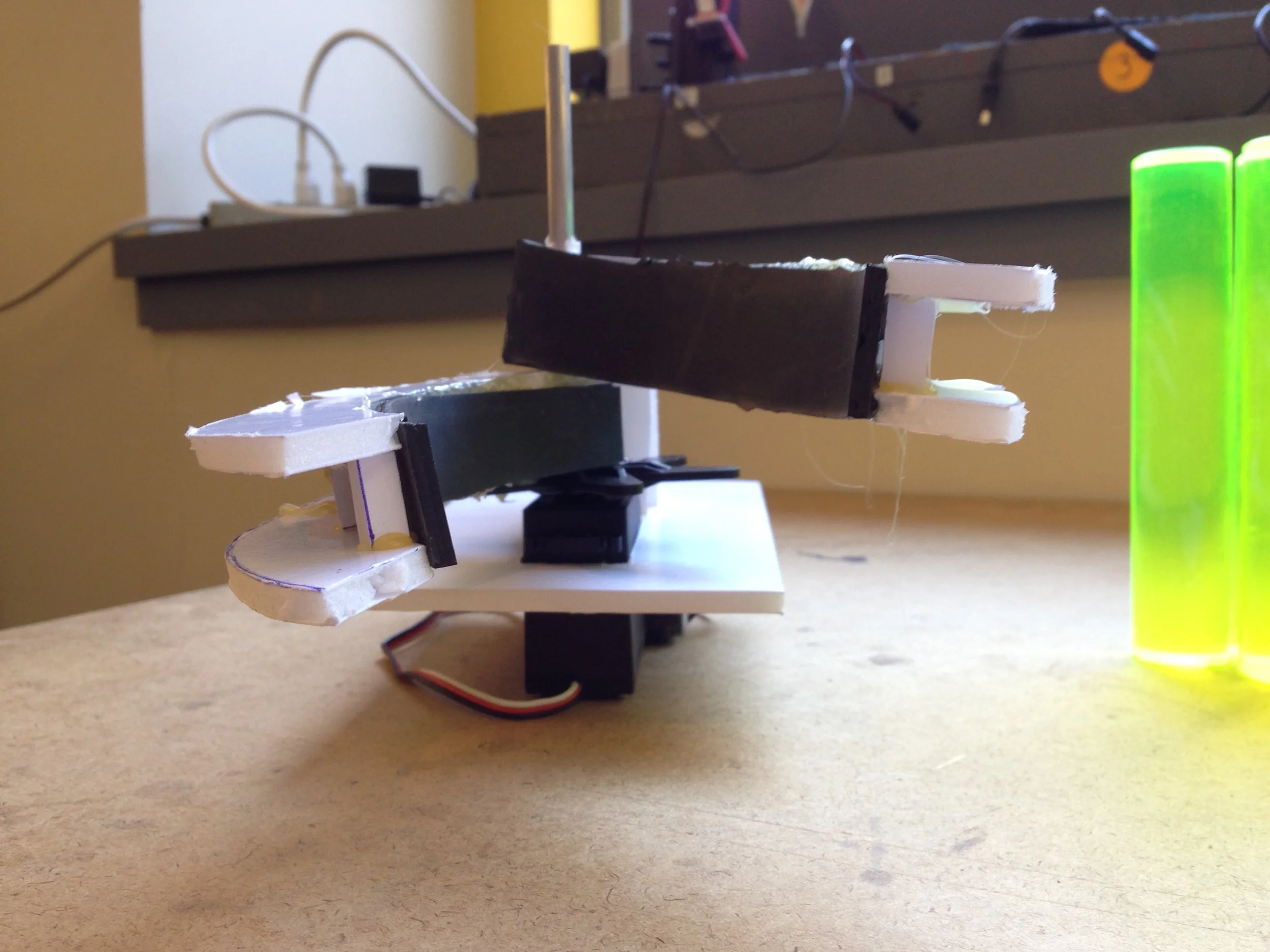

One of those attachments was a claw to pick up and move green acrylic rods. To quickly test out different designs and better understand the motion of the claws, I made a few paper prototypes. The original intent was to pick up all four rods at once, but due to the size of the claw required and the difficulty of maintaining a hold on the rods during transport, this claw was later abandoned for a smaller one which only carried one rod.
First Robot Design Attempt
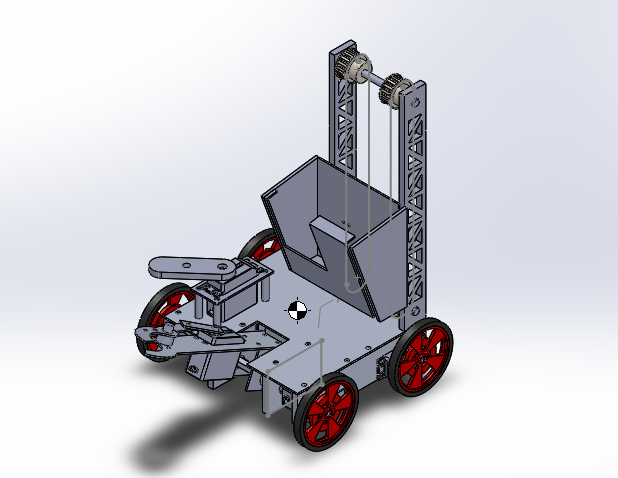
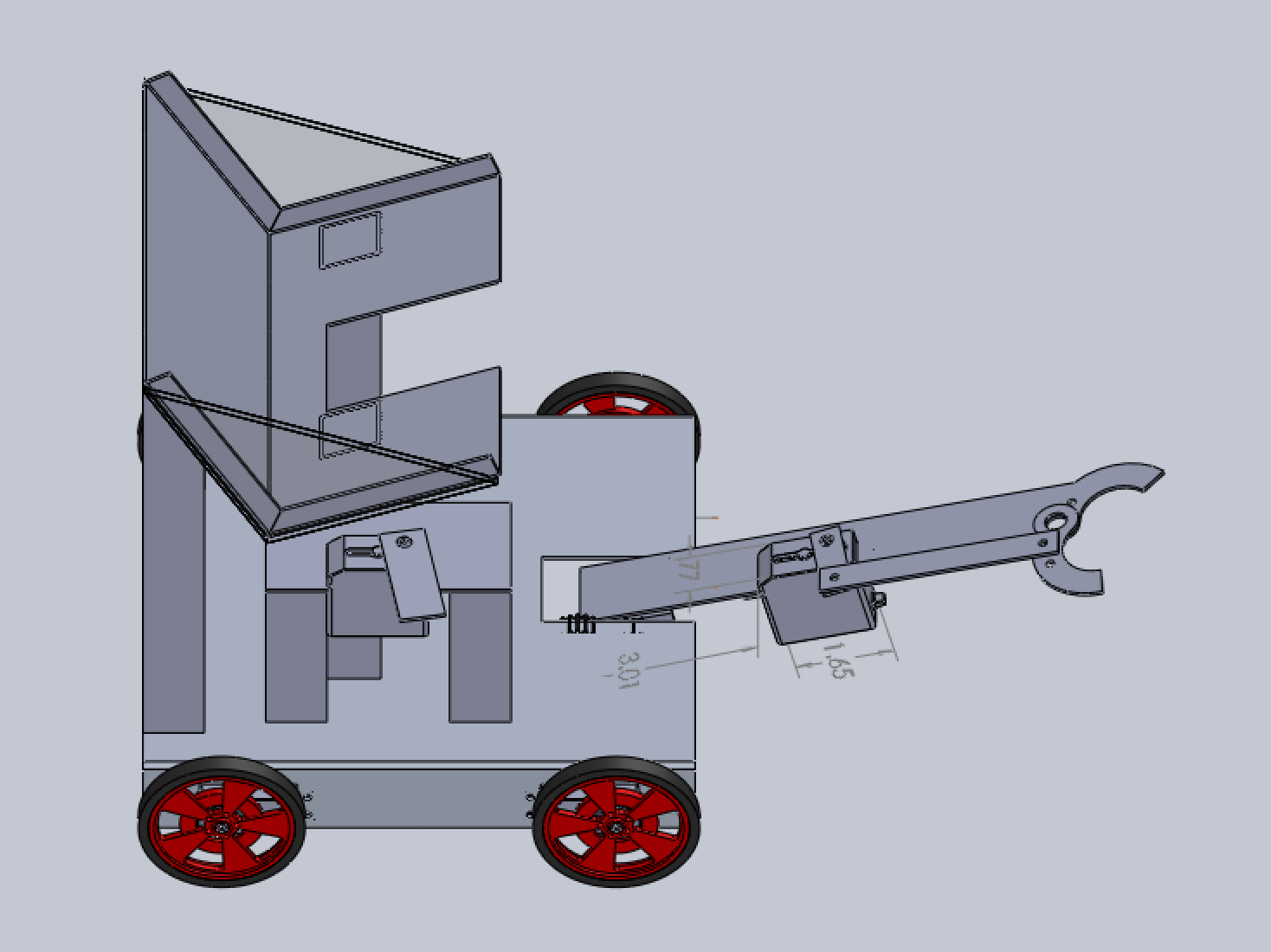
Final Robot Design
The first iteration of the full robot design is pictured on the left. the claw would pick up rods and place them into a hopper. The hopper would also be used to hold manually placed bananas. A small servo with a flipper would be attached to the side of the robot to complete another task to score points. This design was eventually altered to the final one pictured on the right. The hopper was now mounted on belts to enable a "dumping" motion to place scoring pieces into the raised container. The servo mounted on the side was now better supported and the claw was also made to be more robust.
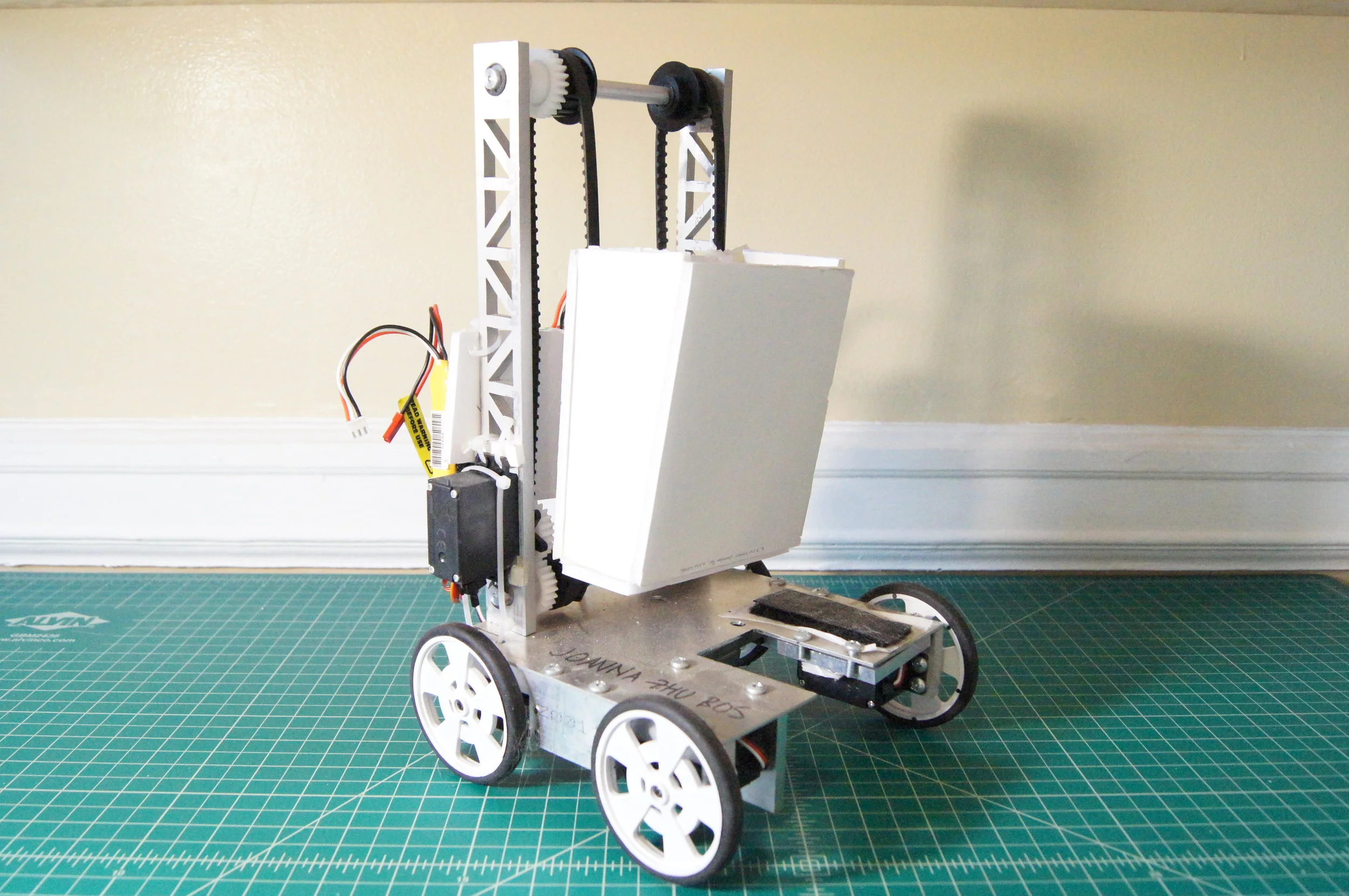
Competition Robot
Due to time constraints of the build and that of the operational period during the competition, some of the drawn up features were not implemented on the final robot. The side mounted servo construction was not completed in time and although other components were, their usefulness and versatility did not outweigh their cumbersomeness during operation. For example, the time it took to pick up rods was ultimately not worth the risk associated with the task nor its point value and, as a result, the claw was removed. In the end, the robot became much simpler and more consistent at scoring.
BananaBot did not move at the final competition due to unforeseen issues with connecting the robot to its controller. This problem had never come up during development and was not able to be debugged during the hours leading up the competition. Still, this project was a great learning exercise into fabrication methods and iterative design.
Under the guidance of Professor Sangbae Kim for 2.007 Design and Manufacturing I in Spring of 2015.